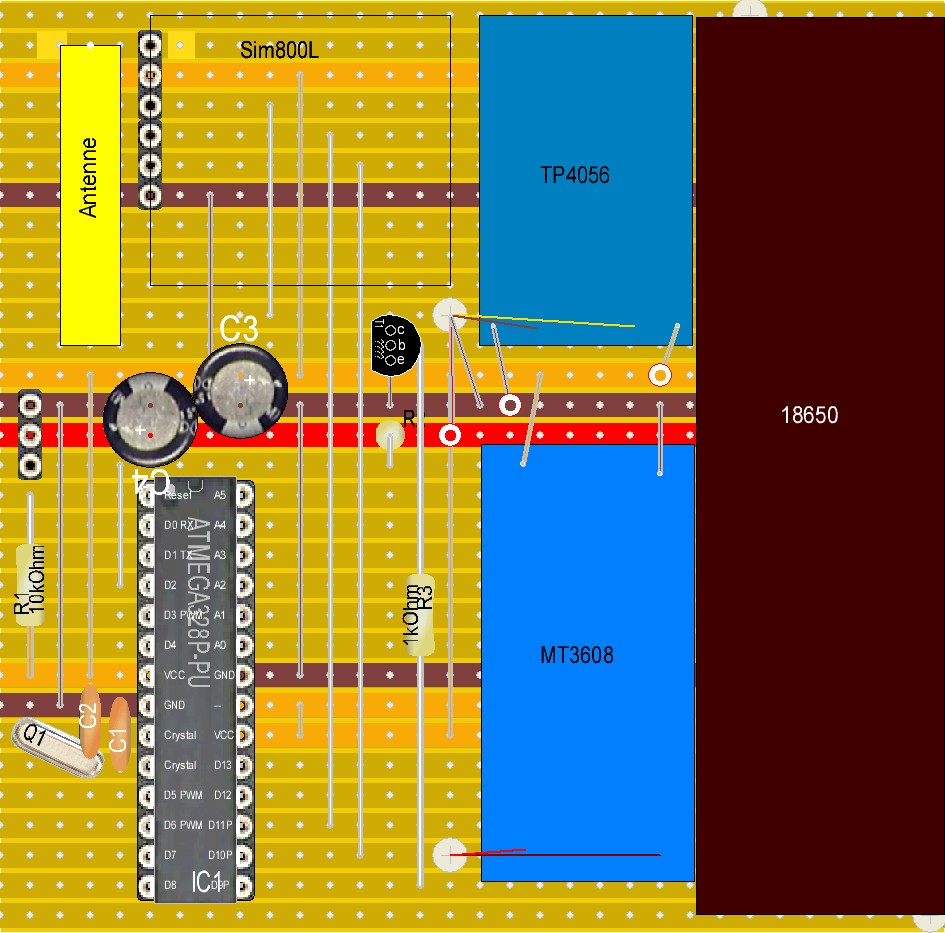
Da aufgrund des hohen Stromverbrauchs vom Prototyp A001 die Solarzelle nicht mit laden hinterher kam, wird eine Neukonstruktion angestrebt. Für eine optimale Energieeinsparung soll statt dem Arduino Nano ein Atmega382P-PU (Standalone) verwendet werden. Da dieser keine 5V benötigt wird dieser auch nicht über das MT3608 betrieben, wodurch die Verlustleistung verringert wird. Ebenso soll der Atmega die Fähigkeit bekommen das Sim800L über den Reset-Pin neuzustarten. Dadurch soll er eventuelle Fehler selbst beheben können.
Meine Webseite wird zwischen dem 23.Dezember 2019 und dem 01.12.2020 nicht ereichbar sein. Grund hierfür ist ein Serverproviderwechsel welcher für den Ausbau vom AtmosFX-Translator und dem Projekt SeeInsight zwingend notwendig geworden ist. Neben dem neuen Server wird auch die Webseite von Grund auf neu aufgebaut. Diesmal aber mit WordPress statt dem MAGIX Web Designer. So sollte auch die Einrichtung eines Halloween-Forums künftig möglich sein. Darüber hinaus kann ich auf dem neuen Server auch Datenbanken betreiben. Der AtmosFX-Translator wird daher umprogrammiert erst gegen Ende Januar 2020 wieder mit einer in Betrieb gehen.
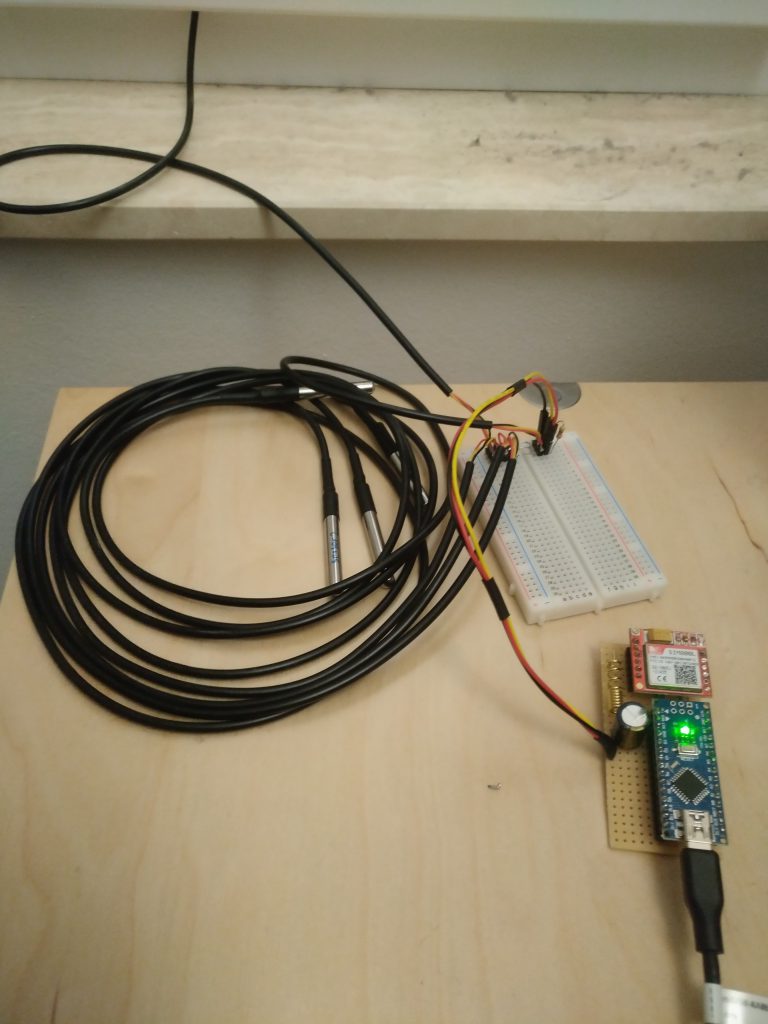
Seit dem letzten Eintrag hat sich viel getan. Zunächst einmal ist die Sensorleitung fertig. Diese beinhaltet 11 DS18B20 Sensoren (0-10m Wassertiefe). Als Leitung wurde geschirmte Telefonleitung genommen. Ein Versuch mit flexibler 3×0,75mm² Leitung, die von einem anderen Projekt noch übrig war, scheiterte schon nach 2 Metern auf Grund zu großer EMV-Störungen. Dies war eigentlich zu erwarten, aber ein Versuch wert. Wahrscheinlich hat mir die Kapazität der Leitung einen Strich durch die Rechnung gemacht. Als Gehäuse wurde eine Outdoor-Box verwendet. Neben dem Prototypen A001 haben noch zwei kleine Powerbanks platz. Diese wurde kurzerhand paralel geschaltet. Mit dieser Konfiguration wollte ich eigentlich den ersten See-Testlauf durchführen. Leider hielten die Powerbanks nur 2-3 Tage durch, 5 Tage hatte ich erwartet. Scheinbar sind die Powerbanks doch kleiner als es auf ihnen drauf steht. Daher werde ich jetzt die Powerbanks durch einen Lipo-Akku mit Solarzelle austauschen. Diesen Schritt wollte ich eigentlich erst später angehen, aber gut.
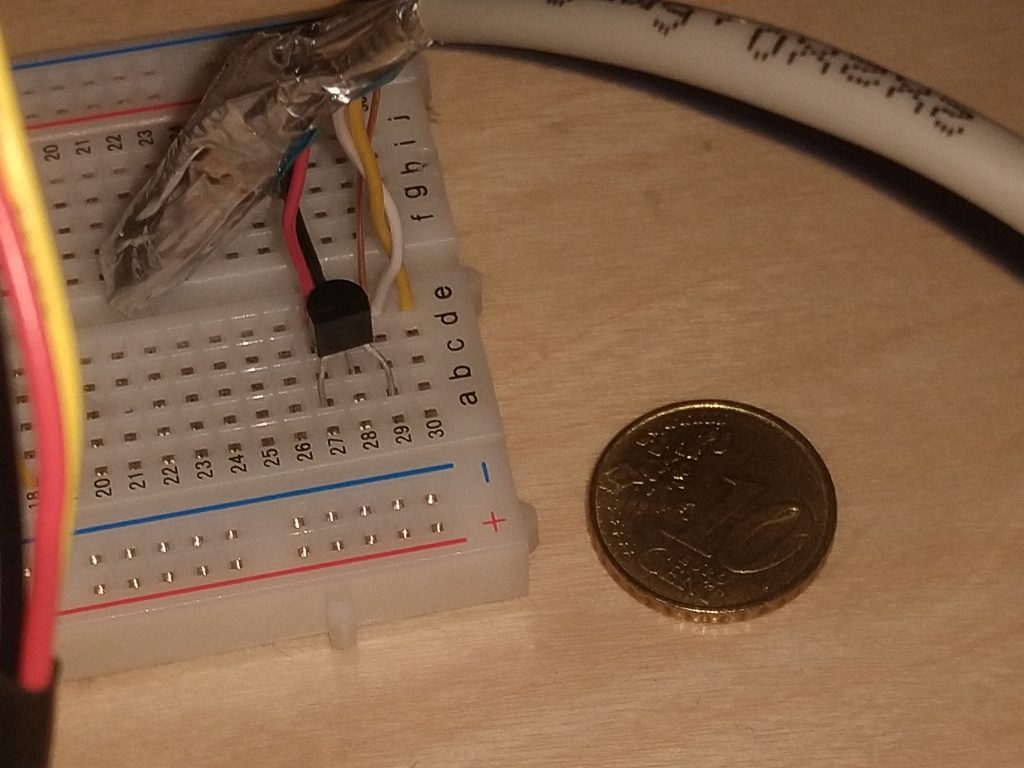
Manchmal ist es ja gut eine SMS-Flat abzuschließen. In diesem Fall hat sie sich sogar gelohnt. Der Arduino lief die letzten 14 Tage im Dauerbetrieb und hat mir minütlich eine SMS mit der aktuellen Außen- und Innen-Temperatur geschickt. Über die Zeit habe ich den Programmcode ausgebaut und bin auf neue DS18B20 Sensoren im T-92 Bauformart umgestiegen. Grund hierfür ist das dieser Typ viel kleiner ist und so durch Schrupfschlauch wasserdicht entlang der Messleitung verpackt werden kann. Die nächsten Schritte werden der Bau einer zehn Meter langen Messleitung und eines Gehäuses für die Steuerung sein.
Prototyp A001 im Dauerbetrieb mit den inzwischen ausgemusterten DS18B20 Sensoren
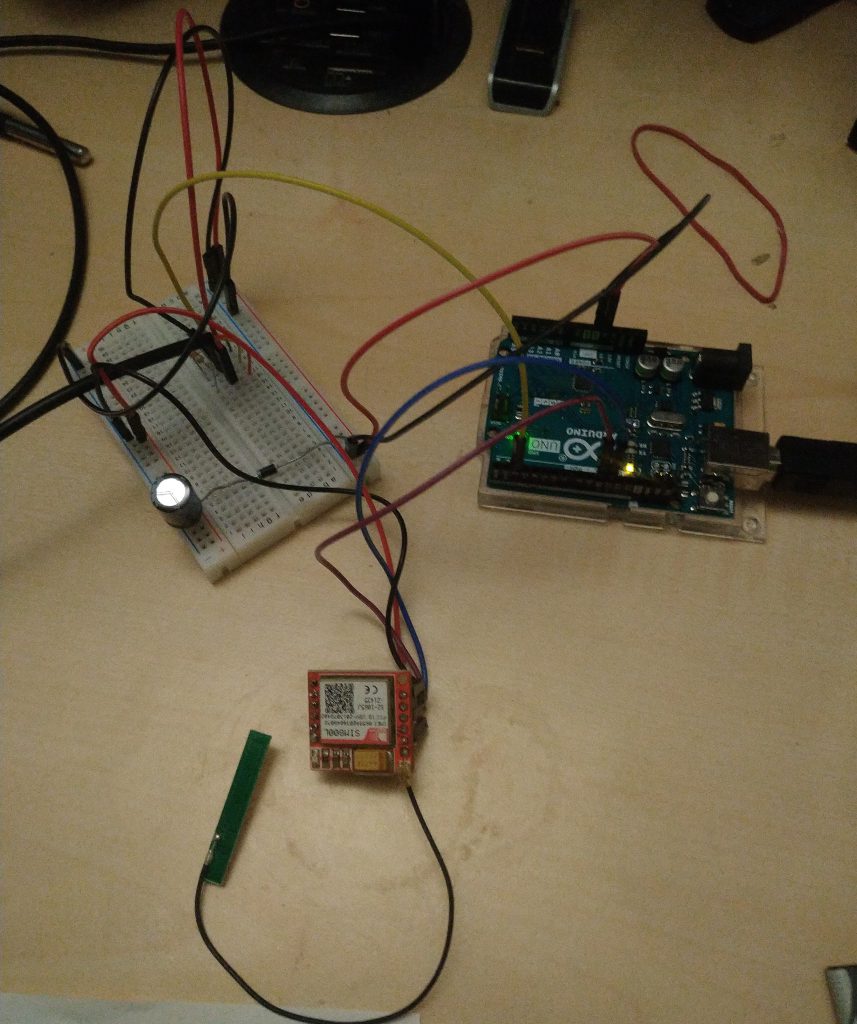
Heute fanden die ersten kleinen Versuche mit dem GSM-Chip Sim800L statt. Die erste SMS „Hallo Welt!“ ist gut angekommen. Danach wurde ein Temperatur Sensor angeschlossen, dessen Werte dann über SMS im Minutentakt verschickt wurden. Sobald demnächst der Arduino Nano ankommt, werden beide auf eine Lochstreifenplatine gelötet um den ganzen Kabelsalat vom Steckbrett zu umgehen.
Heute war schönes Wetter und daher habe ich mit einem befreundeten Taucher das Tauchmobil mal getestet. Der Aufbau sorgte natürlich für Aufsehen bei benachbarten Tauchergruppen.
Damit schließe ich den Bau des Tauchgerätefahrzeugs vorerst ab. Sollte ich in Zukunft mal noch etwas ändern, werde dies hier auf meiner Webseite posten.
Mein Tauchmobil ist endlich fertig. Morgen geht es zum Streitköpfle-See zum ersten Einsatz. Zum Abschluss habe ich für euch nochmal Fotos aus allen Richtungen gemacht.
Eingefahrener Zustand
Auszug im eingefahrenen Zustand
Auf dem Foto sieht man den Auszug um eingefahrenen Zustand. Unter dem Aufzug ist noch ein Stauraum für alles was nicht immer direkt greifbar sein muss oder zu sperrig ist.
Heute bin ich wieder im Handel gewesen und habe das fertig zugeschnittene Holz für meine Flaschenfächer abgeholt. Diese sind, wie auch die Tauchgerätehalterung, für 15 Liter Stahlflaschen ausgelegt, können aber auch die Tasche für die 5L Sauerstoffflasche aufnehmen.
Bei dem Einkauf hab ich direkt wieder mein Auszug testen können 🙂
Das Problem mit der fehlenden Begrenzung für die Mechanik habe ich durch eine zweite Bohrung gelöst, welche auch als Verbindung zwischen dem Hubstab und dem Halter fungiert. Bei der alten Bohrung hab ich eine Schraube mit Mutter genutzt um als Endlagerung zu fungieren. Freu mich schon auf den ersten Tauchgang mit der Halterung.
Die Funktion der Mechanik lässt leider noch etwas zuwünschen übrig, da es keine Begrenzung gibt, wie hoch der Hebel gezogen wird. Aber vom Prinzip her funktioniert es schon mal.